Sensory Augmentation
2022 Experimental Transcranial Electrical Stimulation Device and Biomedical Research Study for Human 2.0 at the MIT Media Lab
Collaborators: Valdemar Danry, Laura Chicos, and Matheus Fonseca
As an initial step toward creating alternate sensing capacity in humans, a group of researchers and I developed an experimental device that allows one to sense behind themselves using electrical brain stimulation.
The sensory experience of our immediate environment shapes our worldview and sense of self. By using technology to augment human senses, I am curious to explore the possibility of a post-human reality. There are a lot of limitations and dogmas built into the categorical thinking we use to make sense of the world around us. Beyond thinking, to go one step further, research shows that categories are built into our sensory perception itself. Can expanding the sensory experience of the world also expand the limitations of identity?
My contribution to the project included project and concept development, experimental study design, research, physical headset design (non-electrical), writing an informed consent form for human subjects in biomedical research, and operating a remote-controlled robot during the studies, visual design, photography, and artistic direction.
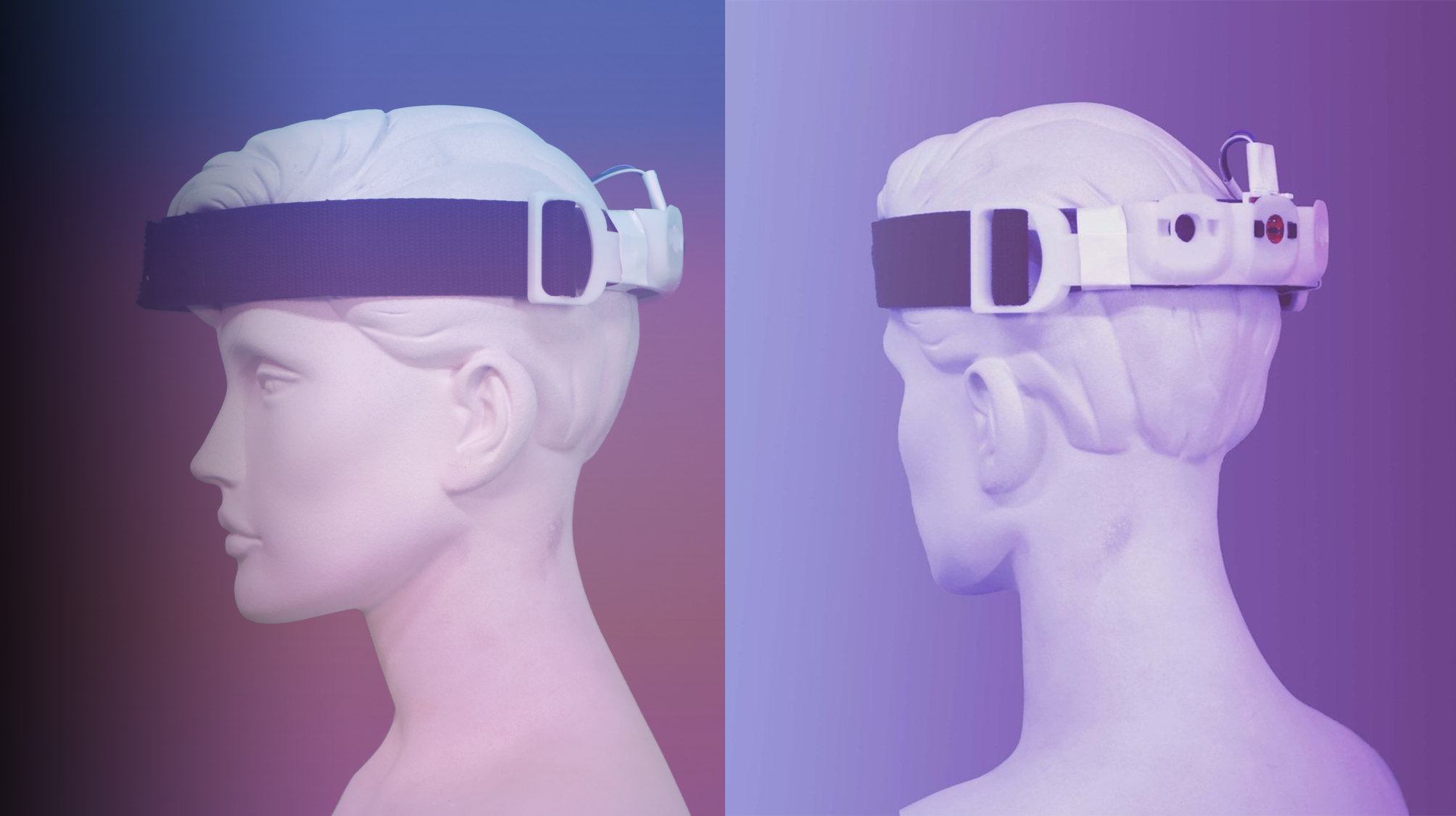
Experimental Device
We designed a custom brain stimulation (TES: Transcranial Electrical Stimulation) device for sensing behind one’s head. Using an infrared sensor, and optic nerve stimulation through TES we created a visual feedback system that could detect moving objects behind individuals. Through a human subject research study, we showed that the device significantly increased a person’s ability to detect a moving robot using this device.
Sensory Augmentation Experimental Study
The study we designed tested multiple aspects of using our device. First, we tested the efficacy of producing visual stimulation using transcranial electrical stimulation by modulating the frequency and amplitude of the alternating electrical current passing through the head. Next, we systematically tested the viability of the device in object detection. This was done with two experiments.
Experiment 1: We drove a remote-controlled robot toward the test subjects at varying speeds. We then recorded and analyzed the subject’s ability to detect the robot before it entered the pre-determined “hit zone”.
Experiment 2: We placed the robot at multiple different angles throughout the room in a stationary position and had test subjects use their sensors to try and detect the location of the robot. We then recorded the speed and accuracy of their ability to detect the robot using the headband.
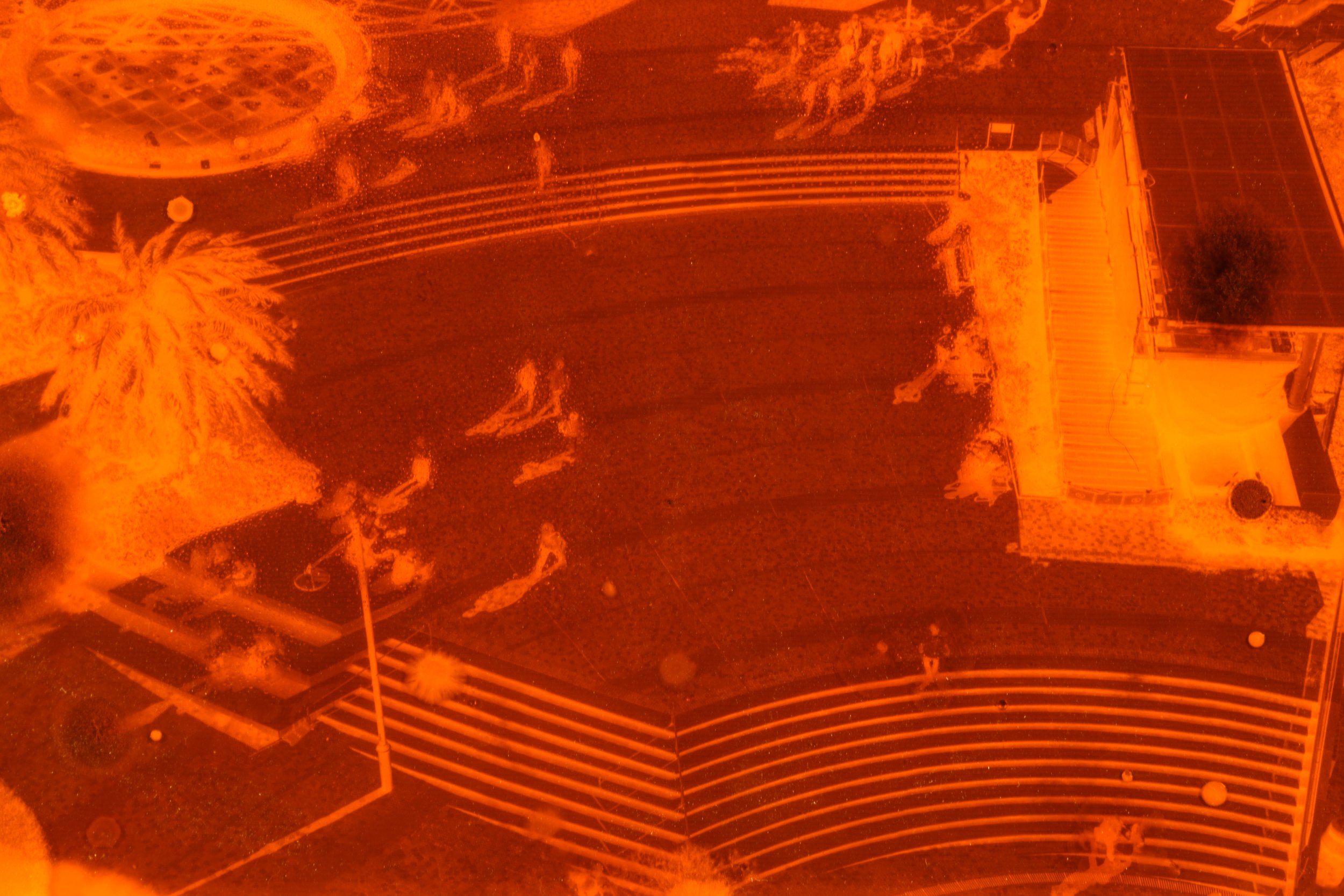
*For the entire duration of the experiments, the subjects kept their eyes closed in a dark room with ear plugs inserted. We used these as a measure to minimize sensory stimuli coming from anything other than the TES device.
This image is portrayed with lights on for representation of various elements of the study only, during the study the room was fully darkened, and the subject had eyes closed and ear plugs inserted.
Results
Results of various test measures show the device significantly increased a person’s sensing capacity when compared to test controls.
Sensation comparison between test subjects who received various TES parameters vs control group with no active stimulation.
More Projects…

Shared Subjectivities

Poetics of Inquiry

Bacterial Consent
Dear Other

On Breath

MonkiWarrior

On Work

On Language

Rootnetwork

Head Space

I Wish To Tell You Something

Can You Hear Me?

On Time

Being Binary

Sound Space